Introduction#
Serial intro#
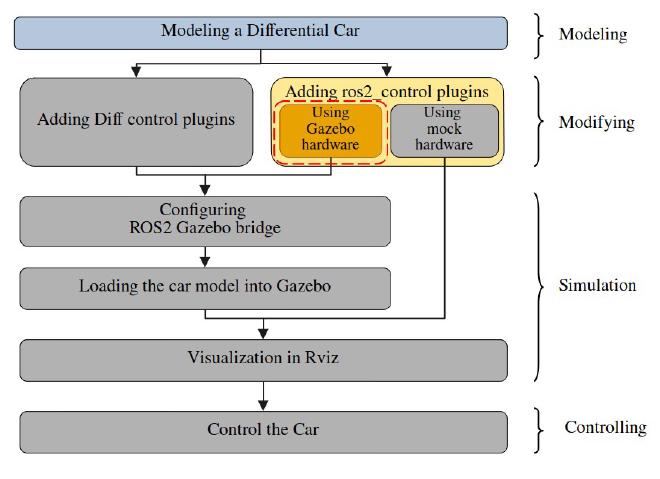
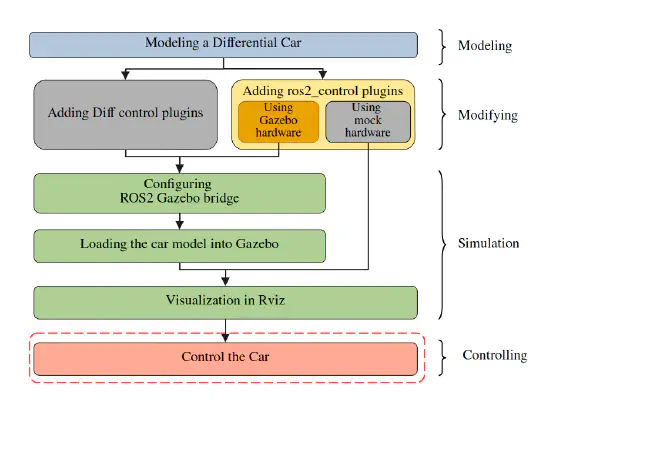
This serial introducing a complete workflow, introducing how to simulate a differential car model in Gazebo Harmonic. No hardware is requested in this tutorial, but you can add hardware easily later. The serial’s syllabus is shown below.

The software used are listed below:
| Software | Version |
|---|---|
| OS | Ubuntu 24.04 |
| ROS | Jazz Jalisco |
| ros2_control | 4.20.0-1noble.20241118.193738 |
| Gazebo | Harmonic |
| Rviz | 14.1.5-1noble.20241115.194822 |
Source code could be found here
About this tutorial#
In this tutorial, we will modify the differential car model to use ros2_control framework and Gazebo interface, detailed introduction about ros2_control can be found on official page.
Modifying#
Section overview#
Since we have already build a differential car model in last tutorial, we will modify the model to use ros2_control.
Tools#
- VS code
Steps#
Duplicate a sdf file#
Duplicate my_diff_car.sdf file in robot_description package, give it a new name: my_diff_car_control_gz.sdf. After that, you should have two different robot description file.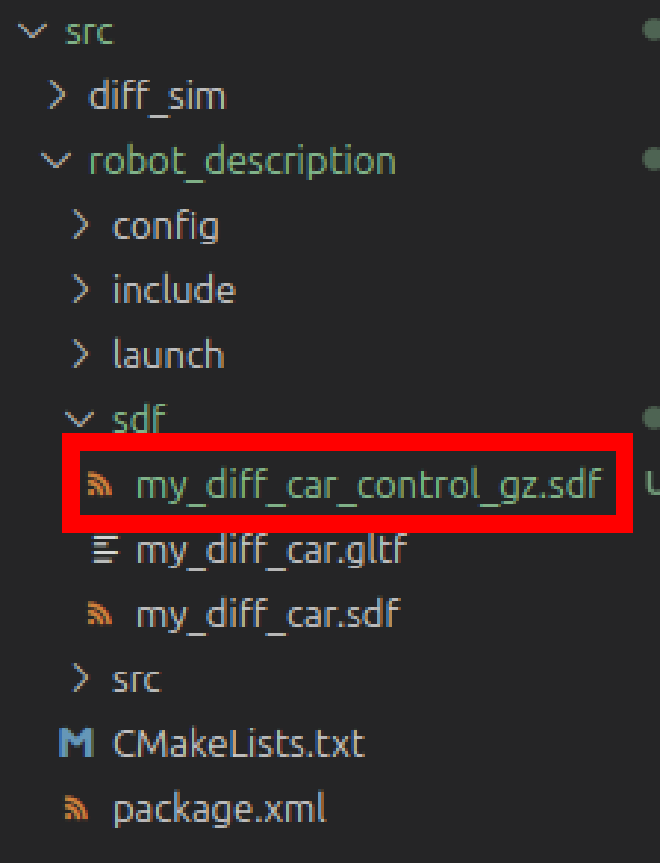
Delete Original plugins#
Delete the joint state publisher and differential drive plugin. We will use ros2_control to control the car and the controller has joint state publish function, so we do not need the plugin now.
Add ros2_control and gazebo plugin#
At ros2_control and Gazebo plugin inside the model tag (where the original plugin should be):
<ros2_control name="robot" type="system">
<hardware>
<plugin>gz_ros2_control/GazeboSimSystem</plugin>
</hardware>
<joint name="base_link_to_right_wheel">
<command_interface name="velocity"/>
<state_interface name="position"/>
<state_interface name="velocity"/>
</joint>
<joint name="base_link_to_left_wheel">
<command_interface name="velocity"/>
<state_interface name="position"/>
<state_interface name="velocity"/>
</joint>
</ros2_control>
<plugin name="gz_ros2_control::GazeboSimROS2ControlPlugin" filename="libgz_ros2_control-system">
<parameters>PARAMETERS_CONFIG_FILE_PLACEHOLDER</parameters>
</plugin>
Here we place a PARAMETERS_CONFIG_FILE_PLACEHOLDER in stead of a real config file path, We will replace it in the launch file, so that we can use different control config file. We also use a <plugin>gz_ros2_control/GazeboSimSystem</plugin> as the ros2_control hardware, this allows to use gazebo to simulation the ros2_control, it can be replaced by a mock hard, which we will introduce later, or a real robot hardware.
Add ros2_control config file#
Open our diff_sim package, create a new file in the config folder named: diff_drive_controller.yaml, fill following content:
controller_manager:
ros__parameters:
update_rate: 20 # Hz
use_sim_time: true
joint_state_broadcaster:
type: joint_state_broadcaster/JointStateBroadcaster
diffbot_base_controller:
ros__parameters:
type: diff_drive_controller/DiffDriveController
left_wheel_names: ["base_link_to_left_wheel"]
right_wheel_names: ["base_link_to_right_wheel"]
wheel_separation: 0.3
#wheels_per_side: 1 # actually 2, but both are controlled by 1 signal
wheel_radius: 0.04
wheel_separation_multiplier: 1.0
left_wheel_radius_multiplier: 1.0
right_wheel_radius_multiplier: 1.0
publish_rate: 50.0
odom_frame_id: odom
base_frame_id: base_footprint
pose_covariance_diagonal: [0.001, 0.001, 0.0, 0.0, 0.0, 0.01]
twist_covariance_diagonal: [0.001, 0.0, 0.0, 0.0, 0.0, 0.01]
open_loop: true
enable_odom_tf: true
cmd_vel_timeout: 0.5
#publish_limited_velocity: true
#velocity_rolling_window_size: 10
# Velocity and acceleration limits
# Whenever a min_* is unspecified, default to -max_*
linear.x.has_velocity_limits: true
linear.x.has_acceleration_limits: true
linear.x.max_velocity: 1.0
linear.x.min_velocity: -1.0
linear.x.max_acceleration: 1.0
linear.x.max_jerk: .NAN
linear.x.min_jerk: .NAN
angular.z.has_velocity_limits: true
angular.z.has_acceleration_limits: true
angular.z.max_velocity: 1.0
angular.z.min_velocity: -1.0
angular.z.max_acceleration: 1.0
angular.z.min_acceleration: -1.0
angular.z.max_jerk: .NAN
angular.z.min_jerk: .NAN
We have a controller managerand a diffbot_base_controller. The controller manager config the parameters of controller manager, and load the joint_state_publisher controller; diffbot_base_controller config the differential controller. Detailed parameter explanation can be found here.
I feel a little bit confused here when using ros2_control for the first. In the last tutorial, we have already used a differential controller plugin directly, and why we bother to use a ros2_control to start a control manager then using it to load a differential controller here. It turns out that using control manager allows more flexibility in loading controllers. We could load, config or unload controller at runtime. And ros2_control provide a set of controller that we can use to.
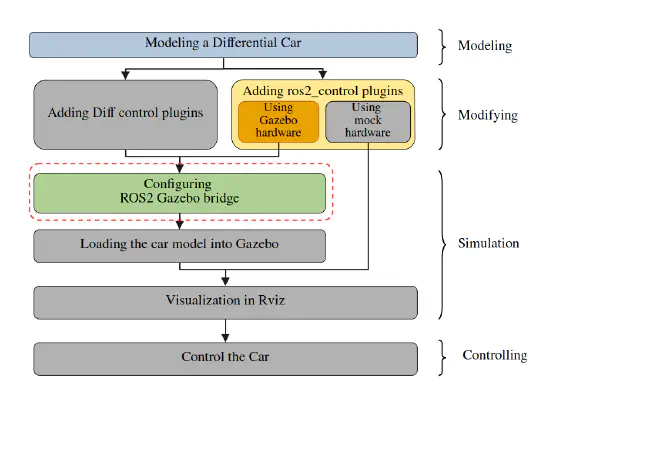
Config bridge#
Section overview#
Tools#
- VS code
Steps#
Duplicate bridge_config.yaml and give it a new name bridge_config_control_gz.yaml. delete bridge config below:
- joint_states
- odom
- tf
- cmd_vel
all above topic will be automatically published by the controller manager. Check out diff_drive_controller.yaml again, you will find all above topic have been config in the file.
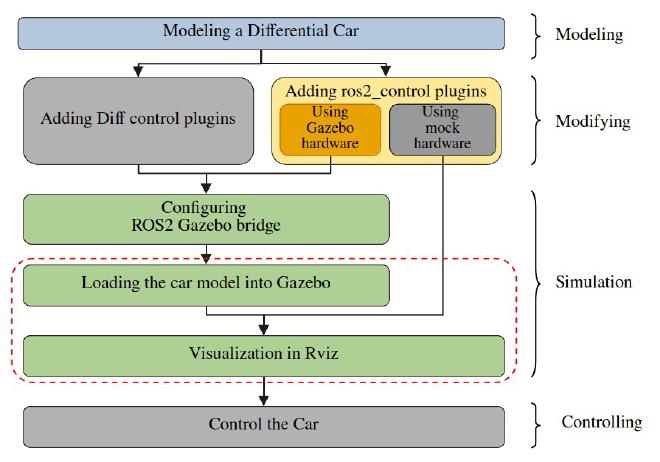
Load model into Gazebo and visualize in Rviz#
Section overview#
Tools#
- VS code
Steps#
create the launch file#
Create a lunch file in launch folder named sim_control_gz.launch.py, fill following content:
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch_ros.actions import Node
from launch.actions import IncludeLaunchDescription, RegisterEventHandler
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.event_handlers import OnProcessExit
import os
from ament_index_python.packages import get_package_share_directory
def generate_launch_description():
# Get the package share directory
robot_description = get_package_share_directory("robot_description")
simulation_package = get_package_share_directory("diff_sim")
# Define the path to RViz, and SDF files
rviz_file = os.path.join(simulation_package, "config", "rviz_config.rviz")
gazebo_launch_file = os.path.join(
get_package_share_directory("ros_gz_sim"), "launch", "gz_sim.launch.py"
)
sdf_file = os.path.join(robot_description, "sdf", "my_diff_car_control_gz.sdf")
# Path to controller file
controller_config_path = os.path.join(
simulation_package,
"config",
"diff_drive_controller.yaml",
)
# Read the robot description file
robot_description_content = open(sdf_file, "r").read()
# replace the PARAMETERS_CONFIG_FILE_PLACEHOLDER with controller
robot_description_content = (
open(sdf_file, "r")
.read()
.replace("PARAMETERS_CONFIG_FILE_PLACEHOLDER", controller_config_path)
)
robot_description = {"robot_description": robot_description_content}
# bridge config file
bridge_params = os.path.join(
simulation_package,
"config",
"bridge_config_control_gz.yaml",
)
joint_state_broadcaster_spawner = Node(
package="controller_manager",
executable="spawner",
arguments=["joint_state_broadcaster"],
)
robot_controller_spawner = Node(
package="controller_manager",
executable="spawner",
arguments=[
"diffbot_base_controller",
"--param-file",
controller_config_path,
],
)
# Define the robot_state_publisher node
robot_state_publisher_node = Node(
package="robot_state_publisher",
executable="robot_state_publisher",
output="screen",
parameters=[robot_description],
)
# Define the RViz node
rviz_node = Node(
package="rviz2",
executable="rviz2",
name="rviz2",
output="screen",
arguments=["-d", rviz_file],
parameters=[{"use_sim_time": True}],
)
world = "empty.world"
world_file = os.path.join(simulation_package, "worlds", world)
# Define the Gazebo node server
gazebo_node = IncludeLaunchDescription(
PythonLaunchDescriptionSource(gazebo_launch_file),
launch_arguments={
"gz_args": [" -r -s -v4 ", world_file],
"on_exit_shutdown": "true",
}.items(),
)
# Gazebo GUI
gzclient_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource(os.path.join(gazebo_launch_file)),
launch_arguments={"gz_args": "-g -v4 "}.items(),
)
# Define the spawn_entity node to spawn the robot in Gazebo
spawn_entity_node = Node(
package="ros_gz_sim",
executable="create",
arguments=[
"-topic",
"/robot_description",
"-name",
"robot",
],
output="screen",
)
start_gazebo_ros_bridge_cmd = Node(
package="ros_gz_bridge",
executable="parameter_bridge",
arguments=[
"--ros-args",
"-p",
f"config_file:={bridge_params}",
],
output="screen",
)
delay_rviz_after_joint_state_broadcaster_spawner = RegisterEventHandler(
event_handler=OnProcessExit(
target_action=joint_state_broadcaster_spawner,
on_exit=[rviz_node],
)
)
delay_joint_state_broadcaster_after_robot_controller_spawner = RegisterEventHandler(
event_handler=OnProcessExit(
target_action=robot_controller_spawner,
on_exit=[joint_state_broadcaster_spawner],
)
)
return LaunchDescription(
[
DeclareLaunchArgument(
"use_sim_time",
default_value="true",
description="Use simulation (Gazebo) clock if true",
),
robot_state_publisher_node,
robot_controller_spawner,
gazebo_node,
gzclient_cmd,
spawn_entity_node,
start_gazebo_ros_bridge_cmd,
delay_joint_state_broadcaster_after_robot_controller_spawner,
delay_rviz_after_joint_state_broadcaster_spawner,
]
)
Comparing to the launch file in last tutorial, we add some controller config file and load the control.
compile and run#
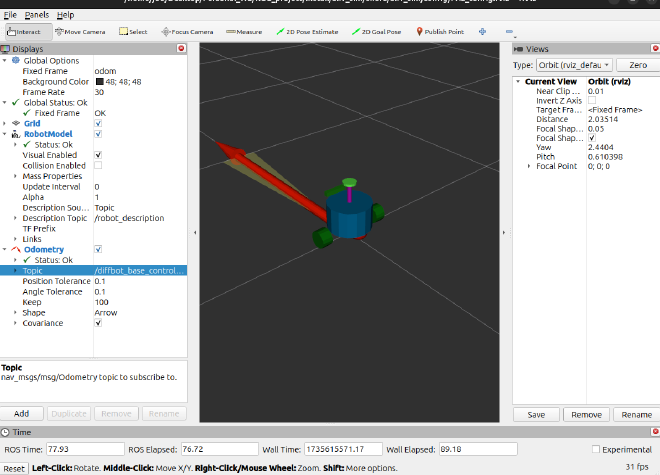
Compile the project and run. You will see Gazebo and Rviz is launched.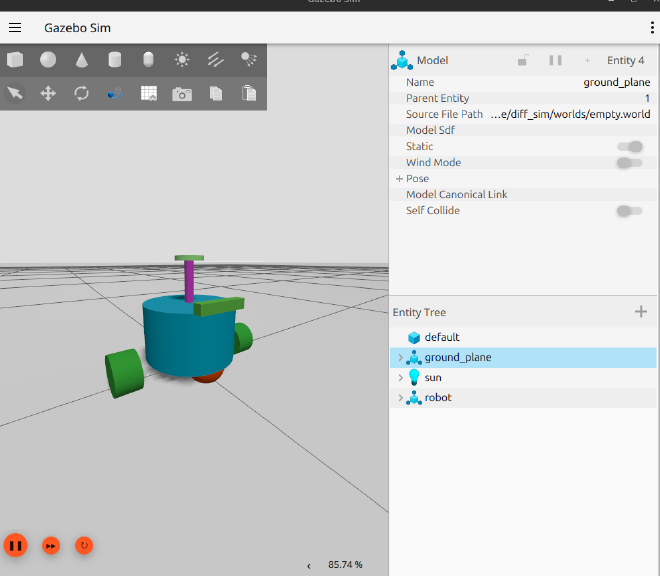
Control the car#
Section overview#
Tools#
- VS code
Steps#
You can visualize all sensor date identical to the last tutorial. But control topic changed when using ros2_control. It uses a topic /diffbot_base_controller/cmd_vel with type geometry_msgs/msg/TwistStamped to control the car. You will have two choices to control it
Using topic to control the car#
launch rqt, in Message Publisher add topic /diffbot_base_controller/cmd_vel you will find the topic has a extra header parameters. Setting linear.x velocity and angular.z velocity, the car in Gazebo and Rviz is moving.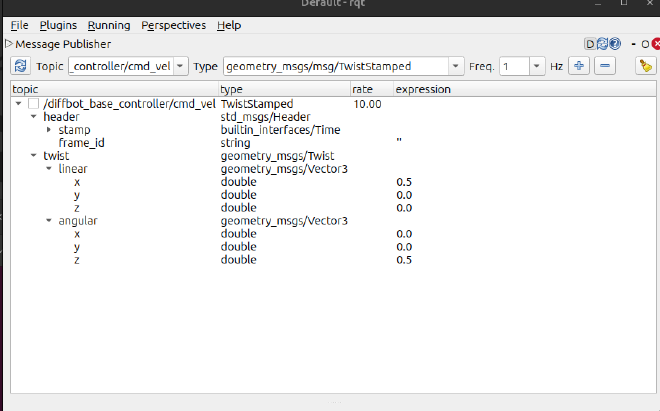
Using game pad to control the car#
Open a new terminal run following command:
ros2 launch teleop_twist_joy teleop-launch.py joy_config:=xbox publish_stamped_twist:=true joy_vel:=/diffbot_base_controller/cmd_vel
You can find that we add some extra parameters to config the header and topic. Connecting the game pad you will find the car is moving in Gazebo and Rviz.